Project Strategy
The overall strategy of µRALP is to elaborate a common basis for analysis, design and control of micro-medical robotic systems for laser phonomicrosurgeries based on the needs and specifications coming from the medical area in a first step. The second step is to develop and evaluate prototypes of micro-optomechatronic devices and associated endoscopic systems for this minimally invasive microsurgery. The third step is to design and implement high-level controllers and surgeon interfaces to allow precise and safe teleoperation of the new micro-mechanisms. The fourth step is to develop and incorporate automation technologies into the surgical system to further increase its precision and safety levels. Finally, the last step is to validate the developed tools and systems through experimentation and collection of clinical data. The final assistive medical robotic system will be primarily evaluated in terms of the increase in laser aiming performance and safety, and the decrease in surgeon training time.
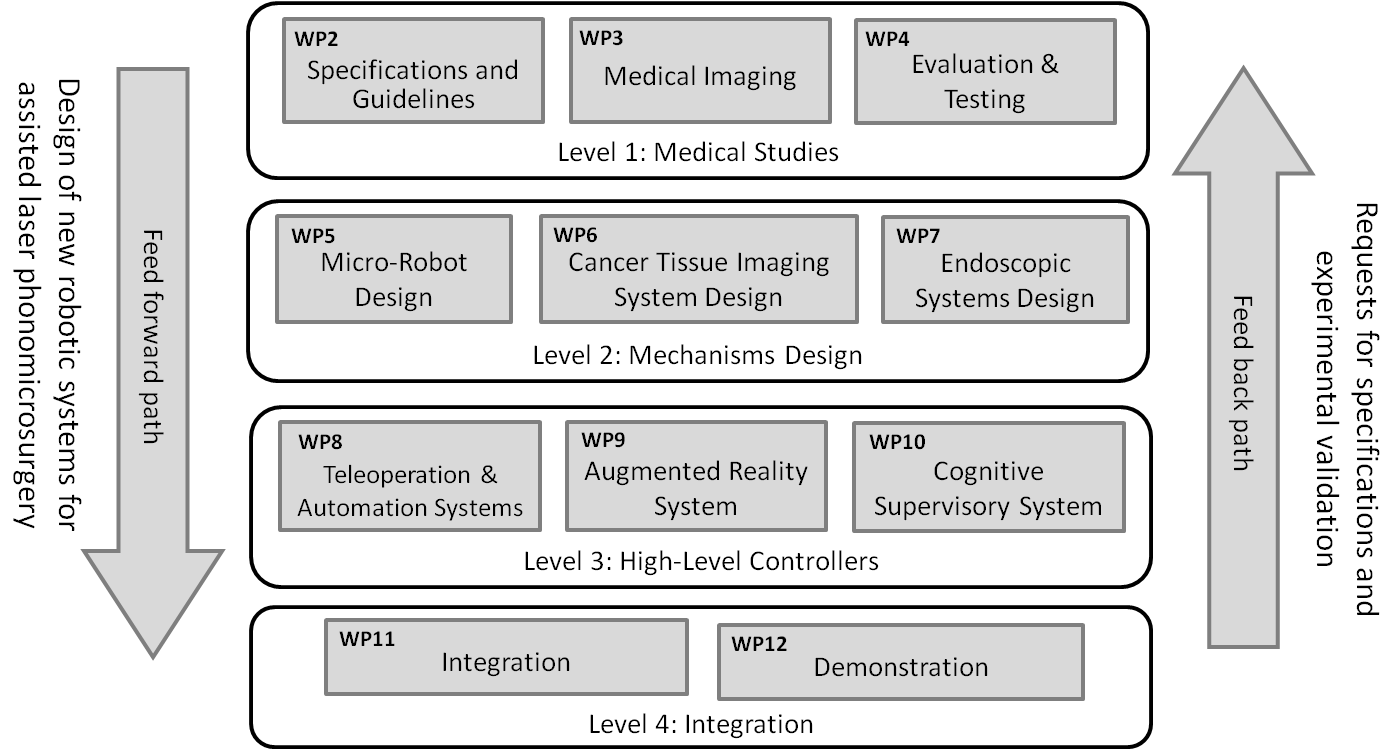
Structure of µRALP's work packages.
According to the methodology described above, the work plan is structured into four levels, treating: This structure corresponds to the main flow of information and results within the project. It reflects the main direction in which dependencies exist between the work packages. However, there exists also an important feedback path within the project, which leads requests for specifications and experimental validations from all other levels to the medical studies. Therefore, the treatment of the different levels will not be sequential, but the various work-packages will start almost simultaneously. However, the main focus during the first part of the project will be on Level 1 and will shift in the course of the project to Level 2, Level 3, and Level 4. In addition, the work packages related to project management, dissemination and use of knowledge (WP1 and WP13) will be always active and covering all research levels. Each level is divided into work packages (as sketched in the figure above), which constitute well delimited topics that can be assigned as the main focus of one of the partners. Each partner has at least one work package in his responsibility as a coordinator, but there is a strong involvement of other partners in the work-packages as well, with at least two partners contributing to each work package. This enables the evaluation of alternative approaches and the exchange of experience and information between partners on a common topic on one side. On the other side this facilitates the cooperation for realization of joint experiments on a common hardware platform. In order to validate the design and control methods, experiments are foreseen on all levels, possibly including real laser surgery experiments using phantoms and ex-vivo pig larynxes.